My research is mainly focused on the safe and stable navigation of sailing robots, which rely only on wind for propulsion. Considering the aero and hydrodynamic disturbances from the environment, this task is extremely challenging. As a core member of my research team, I have been devoted to the front line of ocean experiments for a long time, and strive to help promote the research programs.
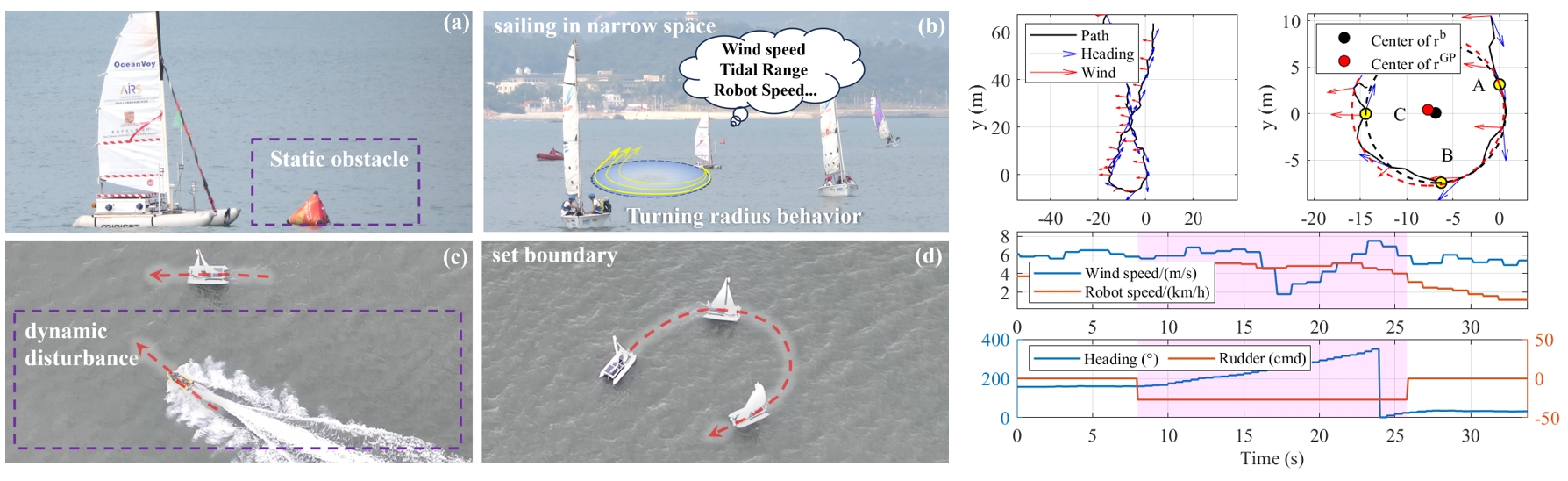
 ICRA2024: A turning radius prediction scheme for sailing robots under complex marine environment. Proposed a turning radius estimation scheme based on Gaussian process regression for sailing in complex marine environment. The influence of tides has been thoroughly analyzed. The feasibility and effectiveness of the proposed scheme have been validated in both simulation and marine experiments. Under experimental circumstances, the Mean Absolute Error (MAE) of the turning radius produced by the trained prediction model is 0.58m.
ICRA2024: A turning radius prediction scheme for sailing robots under complex marine environment. Proposed a turning radius estimation scheme based on Gaussian process regression for sailing in complex marine environment. The influence of tides has been thoroughly analyzed. The feasibility and effectiveness of the proposed scheme have been validated in both simulation and marine experiments. Under experimental circumstances, the Mean Absolute Error (MAE) of the turning radius produced by the trained prediction model is 0.58m.
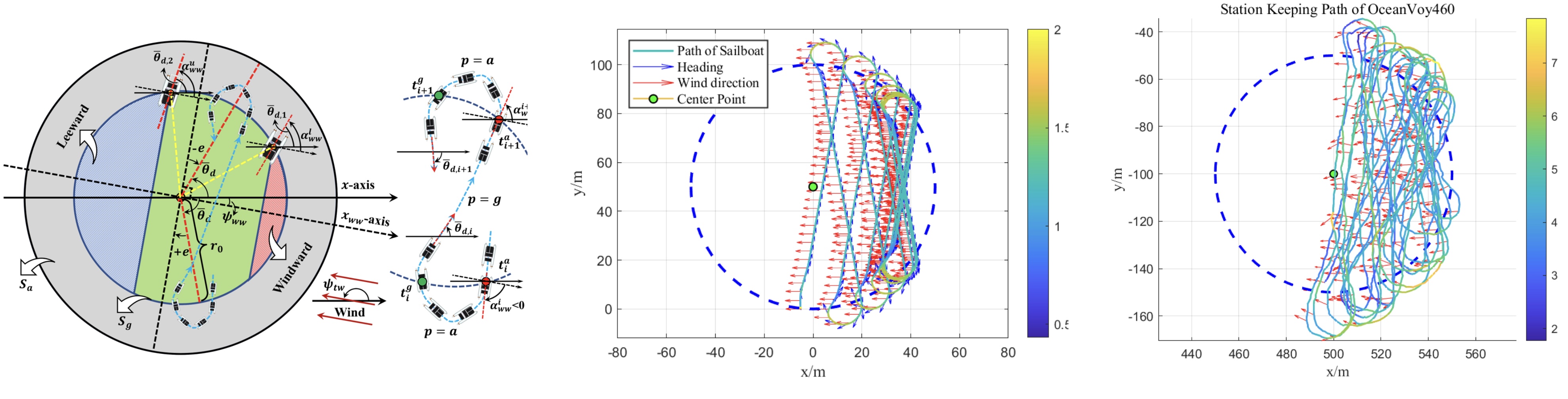
 ICRA2023: Stable Station Keeping of Autonomous Sailing Robots via the Switched Systems Approach for Ocean Observation. Proposed a stable station keeping approach by reciprocating smoothly in the goal observation area and collecting data. An acceptable circular ring was designed for turning buffer. Hereby, stability of switched systems was guranteed with Lyapunov function. Achieved long-term ocean observation by proposing a stable station keeping scheme based on a swithed system approach. The sailing robot realized stable reciprocating observation in a circular area with a radius of 0.78km, lasting more than 24 hours.
ICRA2023: Stable Station Keeping of Autonomous Sailing Robots via the Switched Systems Approach for Ocean Observation. Proposed a stable station keeping approach by reciprocating smoothly in the goal observation area and collecting data. An acceptable circular ring was designed for turning buffer. Hereby, stability of switched systems was guranteed with Lyapunov function. Achieved long-term ocean observation by proposing a stable station keeping scheme based on a swithed system approach. The sailing robot realized stable reciprocating observation in a circular area with a radius of 0.78km, lasting more than 24 hours.
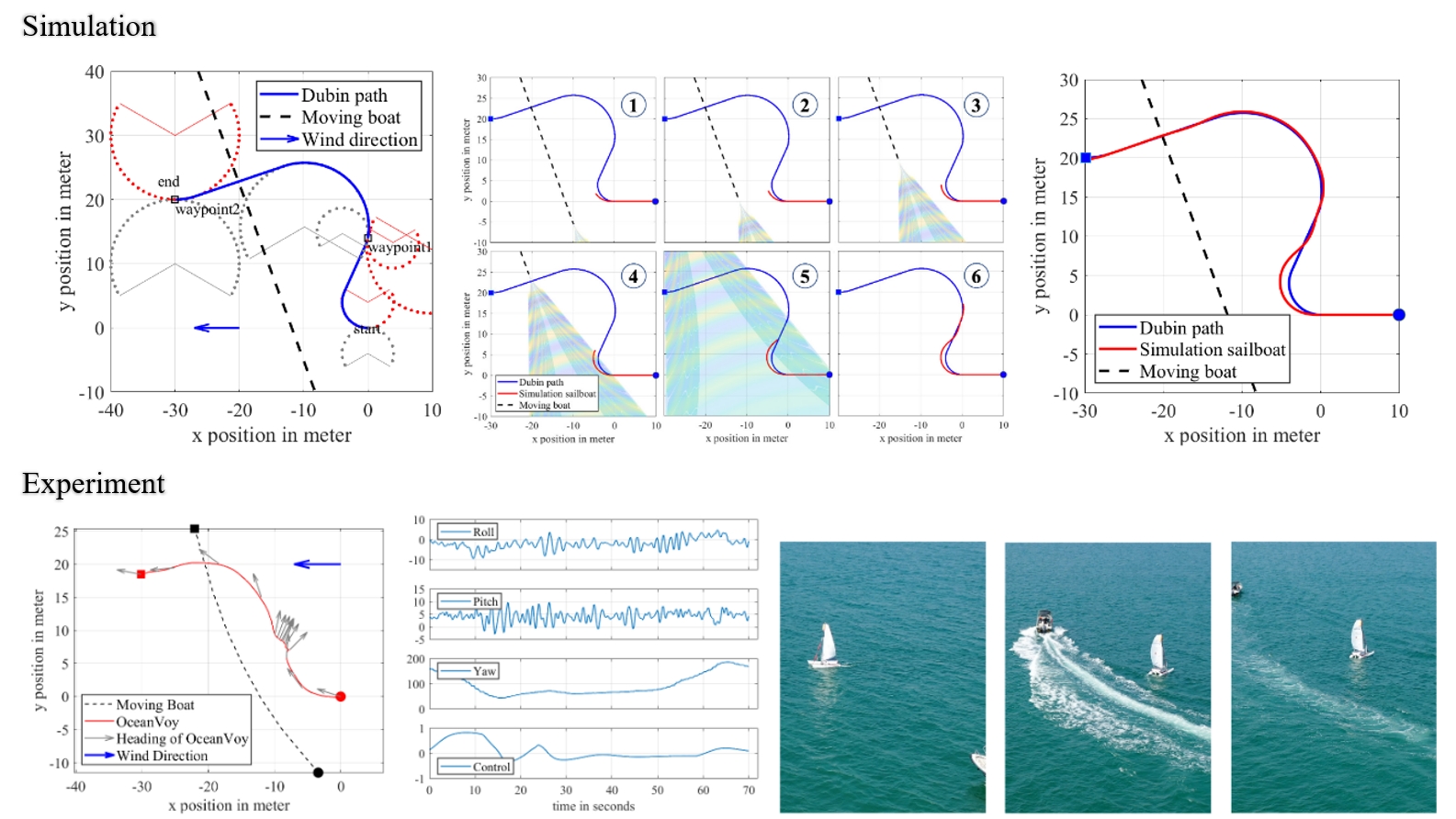
 RAl2021: A Kelvin Wake Avoidance Scheme for Autonomous Sailing Robots Based on Orientation-restricted Dubin Path. Wakes generated by surrounding moving vessels are swift and can have severe adverse effects on a sailboat by causing it to veer off course, stall or capsize. Moreover, sailboats have low mobility and large inertia and will therefore struggle to avoid a wake. Thus, we proposed an orientation-restricted Dubins path-based Kelvin wake-avoidance method. In simulation and experiments, the maximum range of roll in alongside scenario and maximum range of surge acceleration in toward scenario are reduced.
RAl2021: A Kelvin Wake Avoidance Scheme for Autonomous Sailing Robots Based on Orientation-restricted Dubin Path. Wakes generated by surrounding moving vessels are swift and can have severe adverse effects on a sailboat by causing it to veer off course, stall or capsize. Moreover, sailboats have low mobility and large inertia and will therefore struggle to avoid a wake. Thus, we proposed an orientation-restricted Dubins path-based Kelvin wake-avoidance method. In simulation and experiments, the maximum range of roll in alongside scenario and maximum range of surge acceleration in toward scenario are reduced.
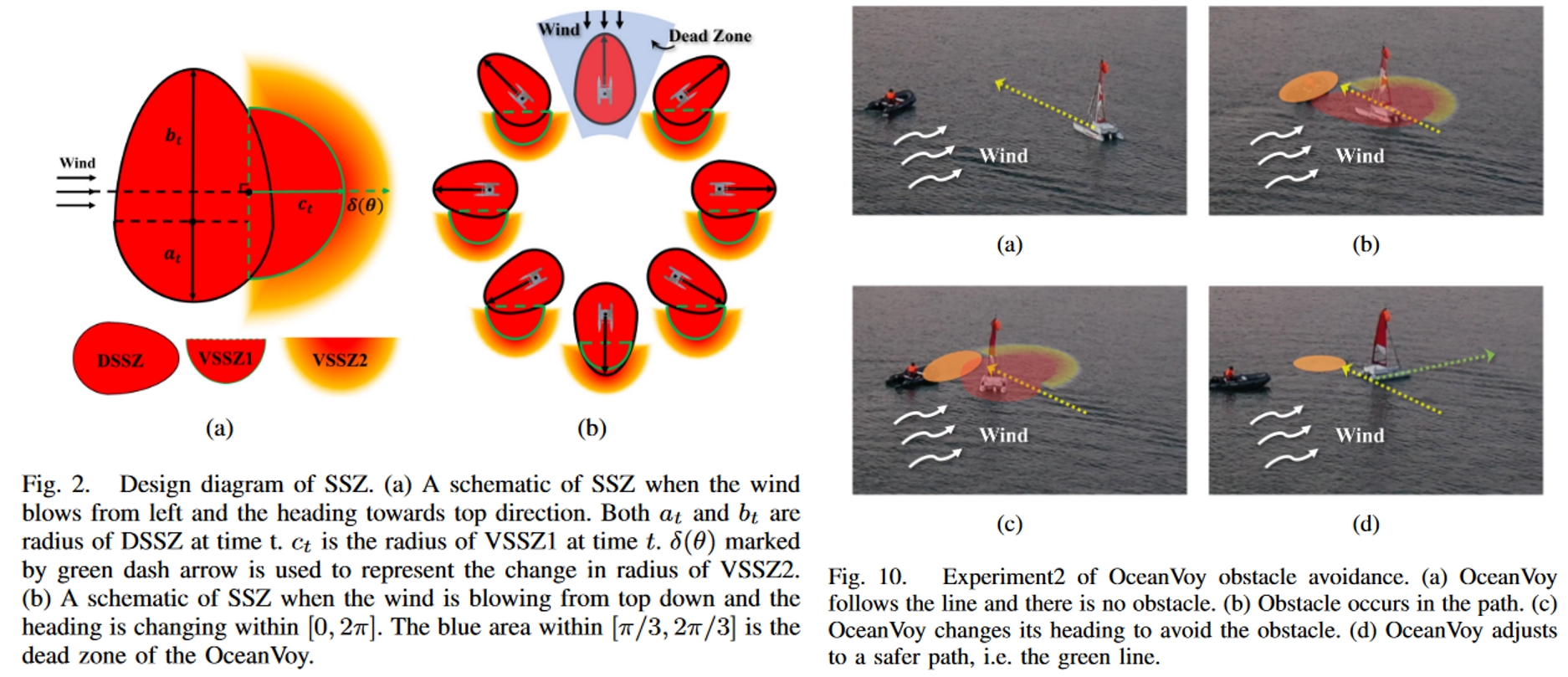
 ICRA2021: Collision Risk Assessment and Obstacle Avoidance Control for Autonomous Sailing Robots. Proposed a novel sailboat safety zone (SSZ) to show the regional distribution of collision risk dynamically. Both intrinsic characteristics of OceanVoy and the complex environmental factors such as wind, waves, tides and obstacles at sea have been considered. To the best knowledge of us, it is the first efficient risk assessment scheme for sailing robots in the world. A collision avoidance algorithm has been designed based on SSZ for safe sailing in real marine environment.
ICRA2021: Collision Risk Assessment and Obstacle Avoidance Control for Autonomous Sailing Robots. Proposed a novel sailboat safety zone (SSZ) to show the regional distribution of collision risk dynamically. Both intrinsic characteristics of OceanVoy and the complex environmental factors such as wind, waves, tides and obstacles at sea have been considered. To the best knowledge of us, it is the first efficient risk assessment scheme for sailing robots in the world. A collision avoidance algorithm has been designed based on SSZ for safe sailing in real marine environment.
Publication
[19] Qinbo Sun, Weimin Qi, and Huihuan Qian, EeLsT: An Energy-efficient Long-short Term Approach for Sustainable Sailboat Autonomy in Disturbed Marine Environment, IEEE Transactions on Robotics (T-RO), 2025. (Accepted)
[18] Weimin Qi (Co-first author), Qinbo Sun and Huihuan Qian, “MoWe: Motion Observation for Wind Estimation of Sailing Robots”, Journal of Field Robotics, 2025.
[17] Weimin Qi, Qinbo Sun, and Huihuan Qian, A turning radius prediction scheme for sailing robots under complex marine environment, 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024.
[16] Weimin Qi, Qinbo Sun, Yu Cao and Huihuan Qian, Stable Station Keeping of Autonomous Sailing Robots via the Switched Systems Approach for Ocean Observation, 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023.
[15] Weimin Qi, Qinbo Sun, Xiaoqiang Ji, Yiwen Liang, Zhongzhong Cao and Huihuan Qian, A Kelvin Wake Avoidance Scheme for Autonomous Sailing Robots Based on Orientation-restricted Dubin Path, IEEE Robotics and Automation Letters (RA-L), 2021.
[14] Weimin Qi, Qinbo Sun, Chongfeng Liu, Xiaoqiang Ji, Zhongzhong Cao, Yiwen Liang and Huihuan Qian, Collision Risk Assessment and Obstacle Avoidance Control for Autonomous Sailing Robots, 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021.
[13] Weimin Qi, Qinbo Sun, Hengli Liu, Zhenglong Sun, Tin Lun Lam and Huihuan Qian, Collision Avoidance for Autonomous Sailboats Based on RRS Protocol, IEEE International Conference on Real-time Computing and Robotics (RCAR), 2019.
[12] Weimin Qi (Co-first author), Qinbo Sun, Cheng Liang, Bairun Lin, Francesco Maurelli and Huihuan Qian, Sailboat Test Arena (STAr): A Remotely Accessible Platform for Robotic Sailboat Research, Journal of Marine Science and Engineering (JMSE), Special Issue "New Trends in Marine Robotics: Virtual Experiments and Remote Access", 2023.
[11] Qinbo Sun, Weimin Qi, Hengli Liu, Xiaoqiang Ji, Huihuan Qian, Towards Long-Term Sailing Robots: State of the Art from Energy Perspectives, Frontiers in Robotics and AI, 2022.
[10] Qinbo Sun, Weimin Qi, Xiaoqiang Ji, and Huihuan Qian, V-stability based control for energy-saving towards long range sailing, IEEE Robotics and Automation Letters (RA-L), 2021.
[9] Ning Ding, Weimin Qi, Huihuan Qian, Crowd Modeling Based on Purposiveness and Destination-driven Analysis Method, Frontiers of Information Technology & Electronic Engineering, 2021.
[8] Qinbo Sun, Weimin Qi, Zhenglong Sun, Tin Lun Lam and Huihuan Qian, OceanVoy: A Hybrid Energy Planning System for Autonomous Sailboat, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
[7] Ziyuan Cheng, Weimin Qi, Qinbo Sun, Hengli Liu, Ning Ding, Zhenglong Sun, Tin Lun Lam, Huihuan Qian, Obstacle Avoidance for Autonomous Sailboats via Reinforcement Learning with Coarse-to-fine Strategy, IEEE International Conference on Robotics and Biomimetics (ROBIO), 2019.
[6] Xianggang Yu, Weimin Qi, Qinbo Sun, Hengli Liu, Zhenglong Sun and Huihuan Qian, A Low-Cost, Wide-Range and Multi-Functional Vision Backend of SailBoat Research Testbed, IEEE International Conference on Realtime Computing and Robotics (RCAR), 2019.
[5] Yao He, Qinbo Sun, Weimin Qi, Xiaoqiang Ji, and Huihuan Qian, Computational Efficient Simulation of Kelvin Wake for Unmanned Surface Vehicles, IEEE International Conference on Realtime Computing and Robotics (RCAR), 2021.
[4] Shuyi Lin, Na Zhang, Qinbo Sun, Weimin Qi, and Huihuan Qian, A simulation and visualization platform for sailing robots with application to marine area scanning, 2023 IEEE Conference on Robotics and Biomimetics (ROBIO), 2023.
[3] Na Zhang, Shuyi Lin, Qinbo Sun, Weimin Qi, and Huihuan Qian, A simulated testing platform of sailing robots: remote access with Hololens2, 2023 IEEE Conference on Robotics and Biomimetics (ROBIO), 2023.
[2] Na Zhang, Shuyi Lin, Qinbo Sun, Weimin Qi and Huihuan Qian, A Data-driven Visualization Platform for Sailing Robots, IEEE International Conference on Real-time Computing and Robotics (RCAR), 2023.
[1] Yafeng Wang, Qinbo Sun, Tristan Berger, Weimin Qi, A Drive-through Recharging Strategy for a Quadrotor, IEEE International Conference on Robotics and Automation (ICRA), 2021.
